
In questo articolo si introducono gli algoritmi di ricostruzione per le misure tomografiche. L’algoritmo viene efficacemente applicato anche alla CT ottica con un processo che consente di correggere la deviazione della traiettoria dei fotoni dovuta al processo di rifrazione. Il metodo applicato sui dati acquisiti permette di recuperare la risoluzione spaziale di 1 mm3 su quasi tutto lo spazio all’interno della provetta.
RICOSTRUZIONE D’IMMAGINE. IL PROBLEMA TOMOGRAFICO
Lo scopo di una tecnica tomografica è di ottenere l’immagine di una sezione (o strato) del campione in esame. Dall’insieme delle sezioni bidimensionali dell’oggetto si può ottenere l’immagine tridimensionale dello stesso.
L’immagine di ciascuna sezione è ottenibile prima esplorando il corpo in esame con un fascio di radiazioni penetranti, ed in seguito applicando ai dati così ottenuti un algoritmo di ricostruzione, che per la sua complessità computazionale deve essere implementato su di un calcolatore (tomografia computerizzata o CT).
In Figura 1 si è schematizzato un fascio parallelo di radiazioni che attraversano un oggetto definito nello spazio a tre dimensioni con una funzione del tipo f(x,y,z). Il numero di conteggi effettuati sui fotoni che hanno oltrepassato l’oggetto può definire una proiezione della distribuzione del coefficiente d’assorbimento nello strato secondo la direzione di detto fascio.
Si noti che nella proiezione è andato perso il contenuto informativo relativo alle variazioni del coefficiente d’assorbimento lungo il cammino delle radiazioni, quindi per ricostruire l’immagine della sezione saranno necessarie più proiezioni ottenute secondo differenti direzioni. Tale risultato è facilmente ottenibile tramite una rotazione relativa dell’oggetto in esame rispetto al sistema sorgente-rivelatore. In realtà per ricostruire esattamente una funzione continua f(x,y,z) sarà necessario un infinito numero di proiezioni.
Posta per f(x, y) la distribuzione spaziale del coefficiente di assorbimento μ(x,y) in una generica sezione del campione, e per I0 l’intensità del fascio incidente, l’intensità della radiazione emergente può essere calcolata attraverso la seguente equazione:
|
|
(3-1) |
essendo L il cammino della radiazione nello strato in considerazione. A questo punto si può definire il segnale osservato, vale a dire la proiezione come:
|
|
(3-2) |

si ottiene così:
|
|
(3-3) |
dove (s, θ) è lo spazio di coordinate del fascio di radiazioni relative all’oggetto, come visualizzato nello schema di Figura 2.

Figura 2 Sistemi di coordinate associati alla proiezione
.
Le tecniche di ricostruzione d’immagine permettono in pratica di ricalcolare la f(x,y) a partire dalle sue proiezioni g(s, θ).
Disponendo di proiezioni bidimensionali, acquisite secondo vari angoli di rotazione dell’oggetto in esame, per poter effettuare la ricostruzione tomografica di uno strato trasversale, si devono estrapolare dal set di immagini i dati relativi allo strato in esame e quindi calcolare la corrispondente proiezione monodimensionale che sarà utilizzata dalla procedura ricostruttiva. Ai fini della ricostruzione, l’oggetto può essere suddiviso idealmente in un certo numero di strati paralleli, secondo la direzione dell’asse di rotazione.
Ciascuna delle proiezioni viene quindi segmentata in un numero di zone contigue contenenti una o più righe di dati. La proiezione monodimensionale di una sezione (o sinogramma) corrisponderà all’insieme di tutti gli strati con stessa quota delle diverse proiezioni.

Utilizzando un CCD come dispositivo di acquisizione, le radiografie saranno segmentate automaticamente in un numero di sezioni dipendente dalla risoluzione. Sarà possibile realizzare un numero di strati diverso applicando la media di più righe o l’interpolazione dei dati, al fine di ottenere rispettivamente un numero di sezioni minore o maggiore. Poiché il dispositivo utilizzato presenta una risoluzione pari a 507 x 512 pixel, si avrà a disposizione un set di dati che suddivide l’oggetto in 507 strati paralleli; per ciascuna proiezione si avranno inoltre 512 campioni.
In base alle caratteristiche del sistema di elaborazione (memoria a disposizione, potenzialità di calcolo) sono possibili diversi approcci per l’implementazione del processo che porta dalla misura alla ricostruzione delle sezioni dell’oggetto. La procedura scelta è quella che divide in due fasi tale processo: la prima, in cui a partire dalle radiografie vengono preparati i sinogrammi di ciascuno strato; la seconda, in cui questi ultimi saranno utilizzati nel processo ricostruttivo.
LA TRASFORMATA DI RADON

.
Considerando l’equazione integrale la trasformata di Radon può essere considerata equivalente ad un’equazione di Fredholm di prima specie, in cui il nucleo dell’equazione integrale corrisponde alla funzione delta di Dirac.
Più in generale il problema della ricostruzione corrisponde al calcolo della trasformata inversa di Radon.

-
OPERATORE DI RETROPROIEZIONE
Aumentando il numero delle proiezioni utilizzate (che in ogni modo nel caso pratico resterà limitato), gli artefatti a stella tendono ad essere sempre più mascherati e a lasciare in ogni caso un annebbiamento di fondo nella ricostruzione (vedi Figura 9).

Esaminando il processo ricostruttivo, è possibile determinare la natura del suddetto annebbiamento. Si consideri per semplicità, l’accumularsi delle proiezioni che intercettano il centro di rotazione, la massima sovrapposizione sarà in tale punto, mentre per i punti esterni l’intensità sarà abbattuta proporzionalmente alla distanza da questo. La variazione dell’intensità dell’alone prodotto appare allora come una semplice funzione di 1/r, dove r è la distanza dal centro della matrice. La ricostruzione è pari all’immagine originale sfuocata con una funzione di risposta impulsiva del tipo 1/r, ovverosia nel dominio (x,y):
CONSIDERAZIONI PER L’IMPLEMENTAZIONE DIGITALE DELLA F.B.P.
Essendo la filter back-projection uno degli algoritmi più diffusi per la ricostruzione d’immagine, è conveniente considerare alcune questioni d’importanza fondamentale al fine di renderne possibile l’implementazione digitale.
CAMPIONAMENTO E FENOMENO E ALIASING
L’effetto del sottocampionamento sulla ricostruzione è presentato nelle Figure 16-24; aumentando il numero di proiezioni utilizzato, l’artefatto diminuisca gradualmente.
Utilizzare un numero di proiezioni superiore a quello dei campioni, non porta un sostanziale beneficio, anzi, la ricostruzione richiede un onere computazionale superiore, che può portare ad un degrado nelle prestazioni dell’algoritmo.


Figura 16 Ricostruzione di un fantoccio avente dimensione 200×200. Il numero di proiezioni è stato scelto pari a 10


Figura 17 Ricostruzione di un fantoccio avente dimensione 200×200. Il numero di proiezioni è stato scelto pari a 50


Figura 18 Ricostruzione di un fantoccio avente dimensione 200×200. Il numero di proiezioni è stato scelto pari a 100
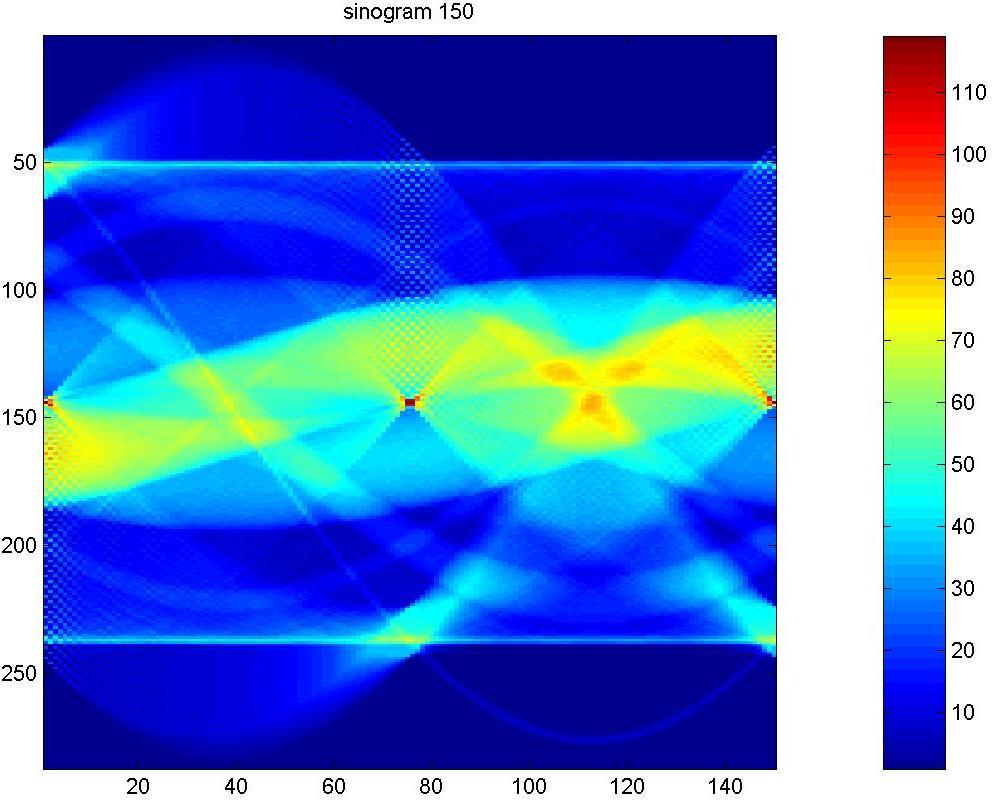
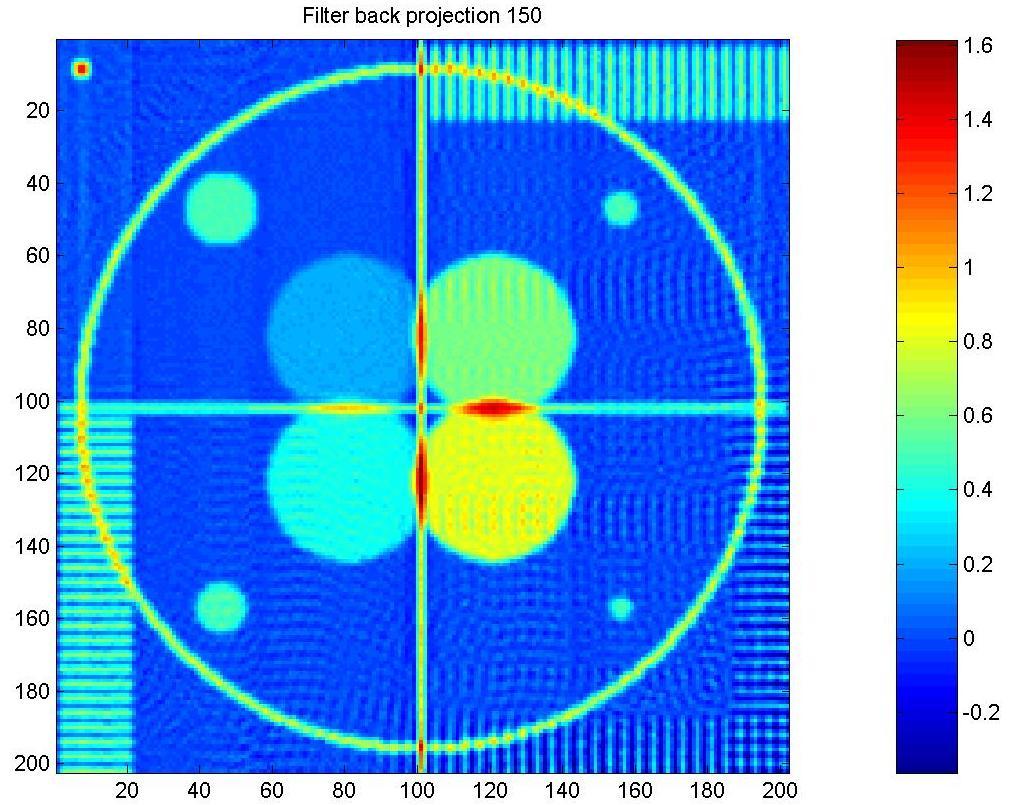
Figura 19 Ricostruzione di un fantoccio avente dimensione 200×200. Il numero di proiezioni è stato scelto pari a 150


Figura 20 Ricostruzione di un fantoccio avente dimensione 200×200. Il numero di proiezioni è stato scelto pari a 200
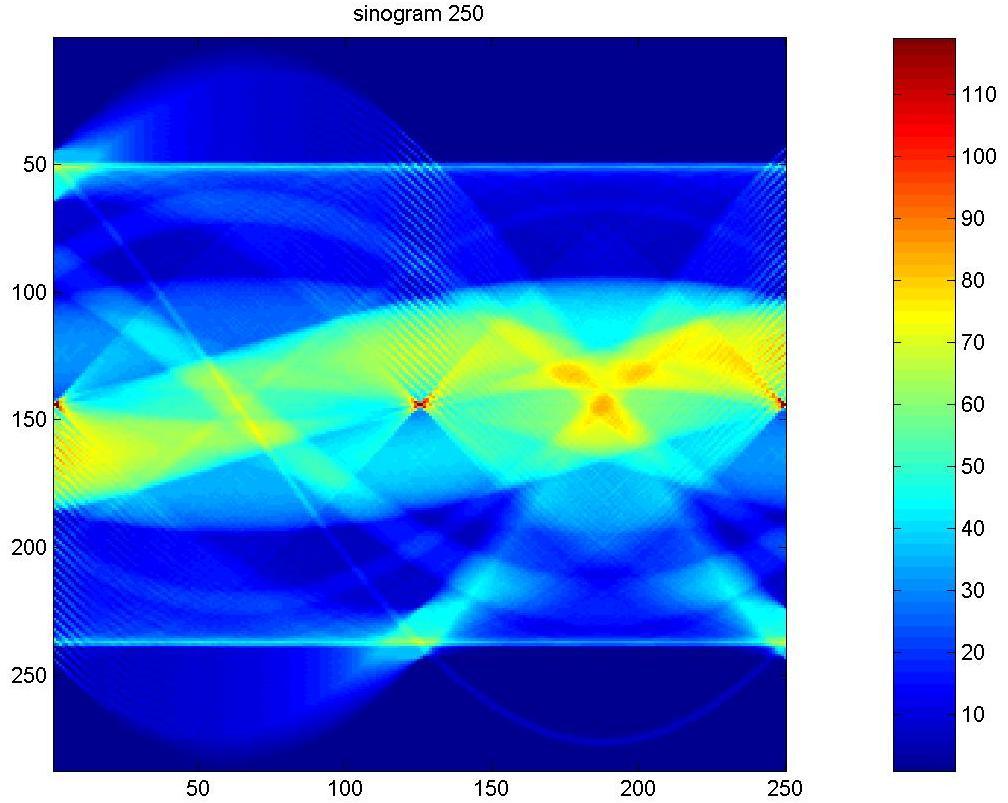
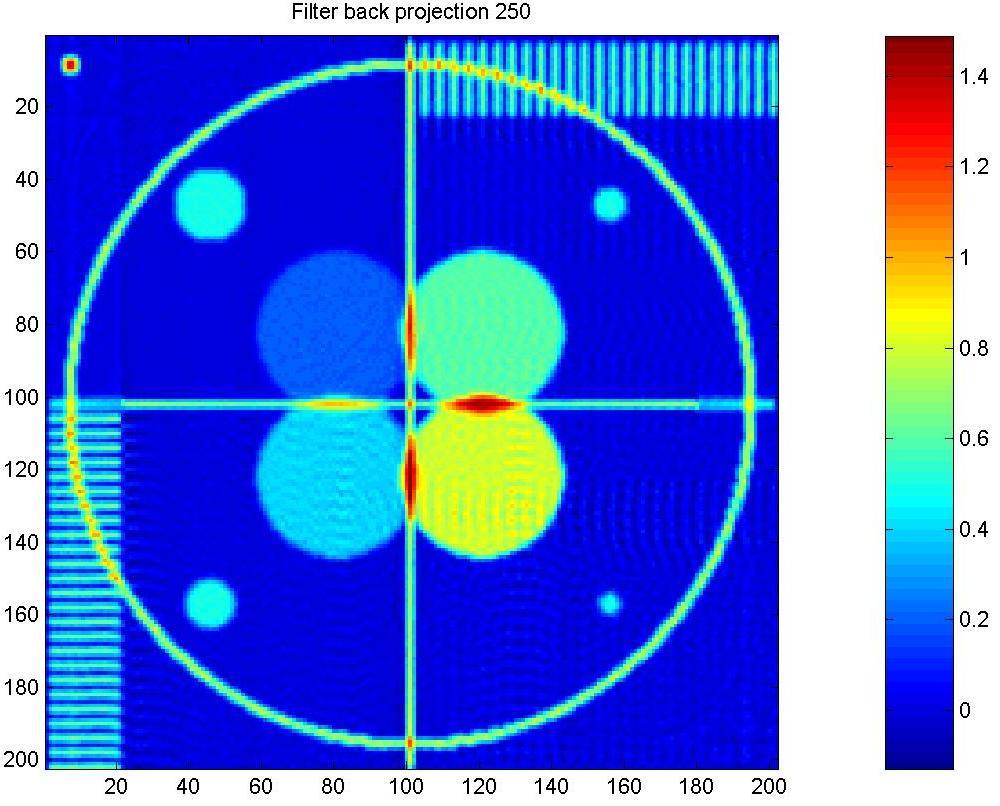
Figura 21 Ricostruzione di un fantoccio avente dimensione 200×200. Il numero di proiezioni è stato scelto pari a 250
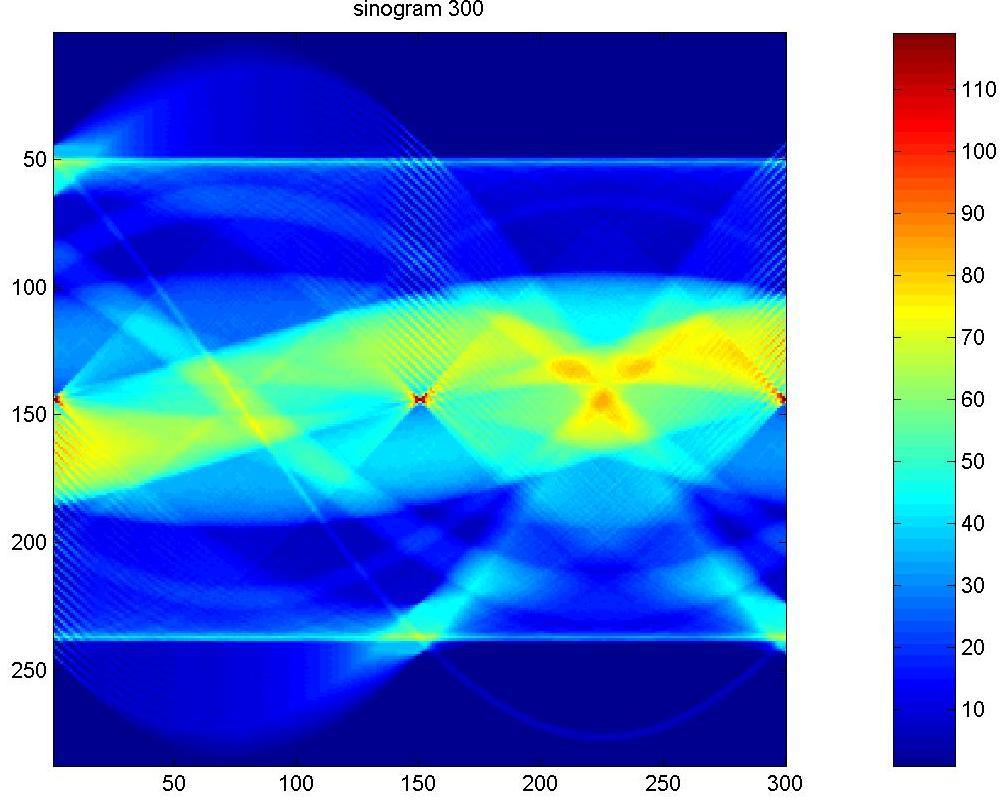

Figura 22 Ricostruzione di un fantoccio avente dimensione 200×200. Il numero di proiezioni è stato scelto pari a 300


Figura 23 Ricostruzione di un fantoccio avente dimensione 200×200. Il numero di proiezioni è stato scelto pari a 350
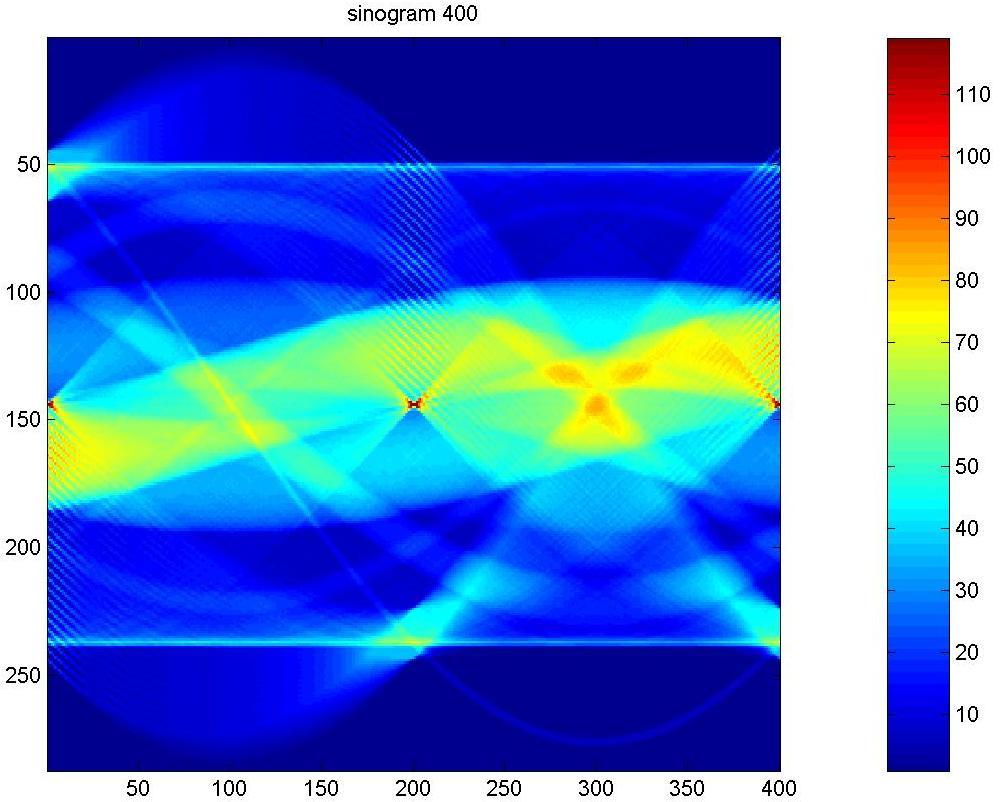
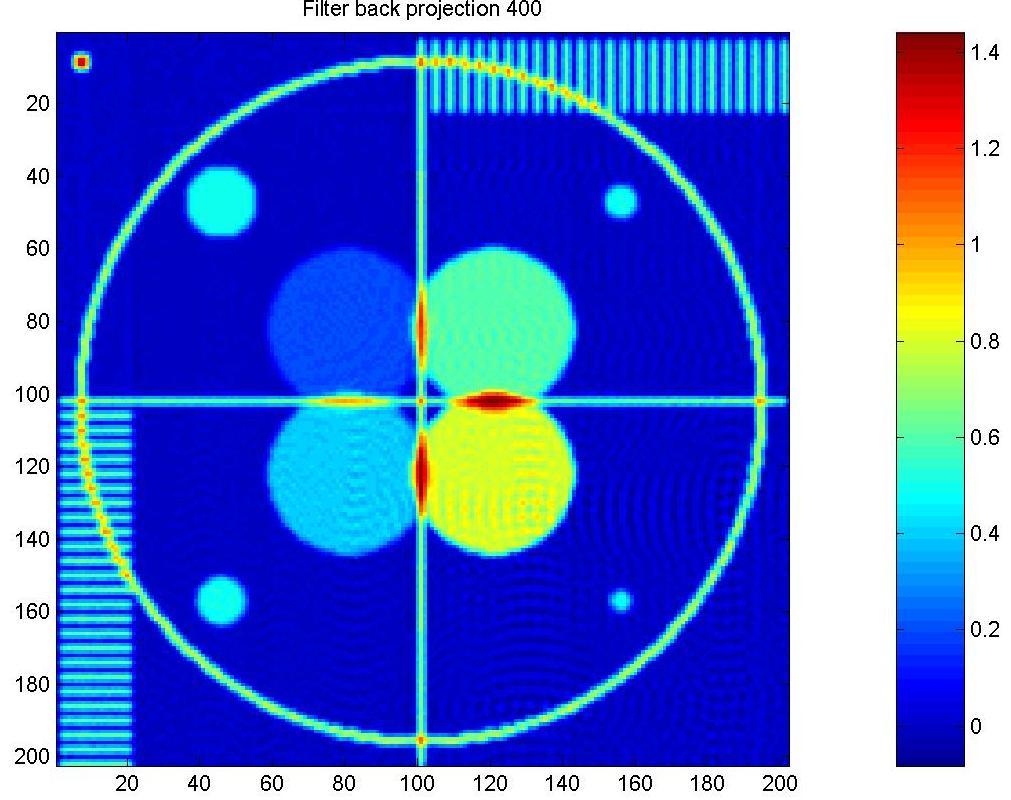
Figura 24 Ricostruzione di un fantoccio avente dimensione 200×200. Il numero di proiezioni è stato scelto pari a 400
SCELTA DEL FILTRO
Nelle Figure 27-31 si visualizza il processo di ricostruzione in un caso ideale in cui si suppone che il processo di misura avvenga senza l’introduzione di rumore o di altri errori introdotti dal tomografo.
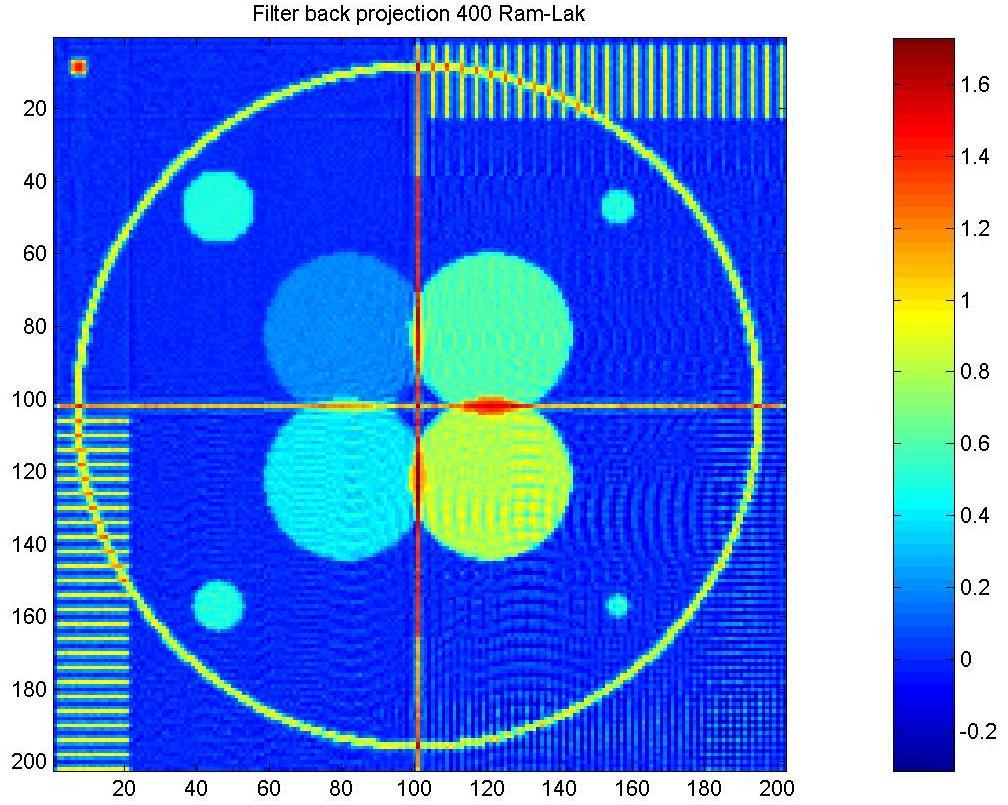

Figura 27 Ricostruzione d’immagine con diversi filtri. Filtro Ram-Lak – Ricostruzione d’immagine con diversi filtri. Filtro Shepp-Logan


Figura 29 Ricostruzione d’immagine con diversi filtri. Filtro Lowpass cosine – Ricostruzione d’immagine con diversi filtri. Filtro di Hamming

Figura 31 Ricostruzione d’immagine con diversi filtri. Filtro Hann
Nelle Figure 27-31 si visualizza l’azione dei filtri nella ricostruzione di un fantoccio in cui è stato aggiunto del rumore “sale e pepe” con intensità pari al 0.5 % rispetto all’intensità del segnale. Il filtro Ram-Lak lascia passare e/o amplifica il rumore. Il filtro di Hann, al contrario, produce la ricostruzione meno affetta da rumore, a discapito però della risoluzione, infatti, l’immagine risulta evidentemente ammorbidita. A metà strada fra i due sono il filtro di Shepp-Logan e il filtro di Hamming generalizzato, che limitano il passaggio di rumore, contenendo però l’ammorbidimento (e quindi la perdita di risoluzione) della ricostruzione.
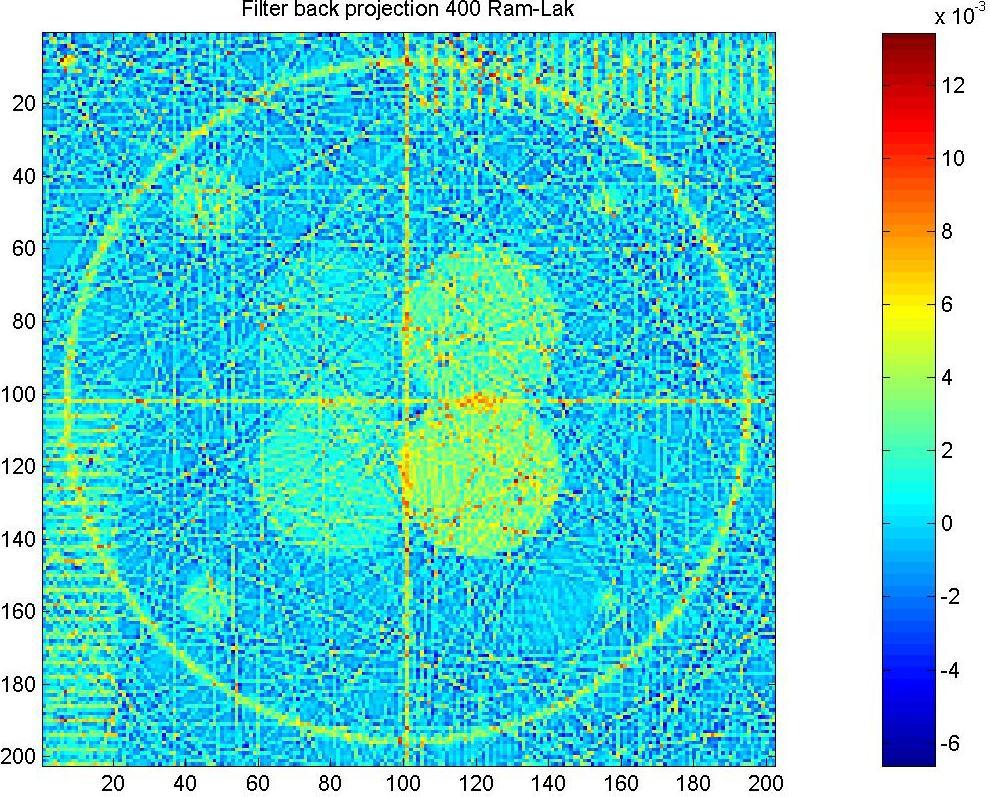
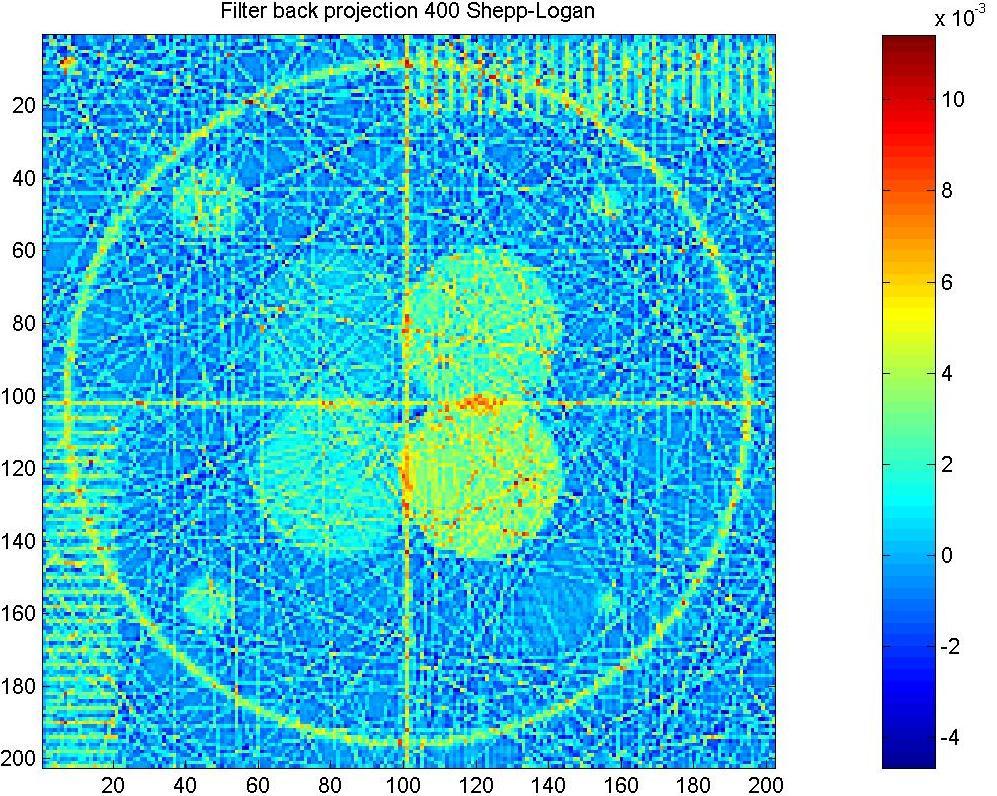
Figura 32 Ricostruzione d’immagine con diversi filtri. Filtro di Ram-Lak – Ricostruzione d’immagine con diversi filtri. Filtro Shepp- Logan
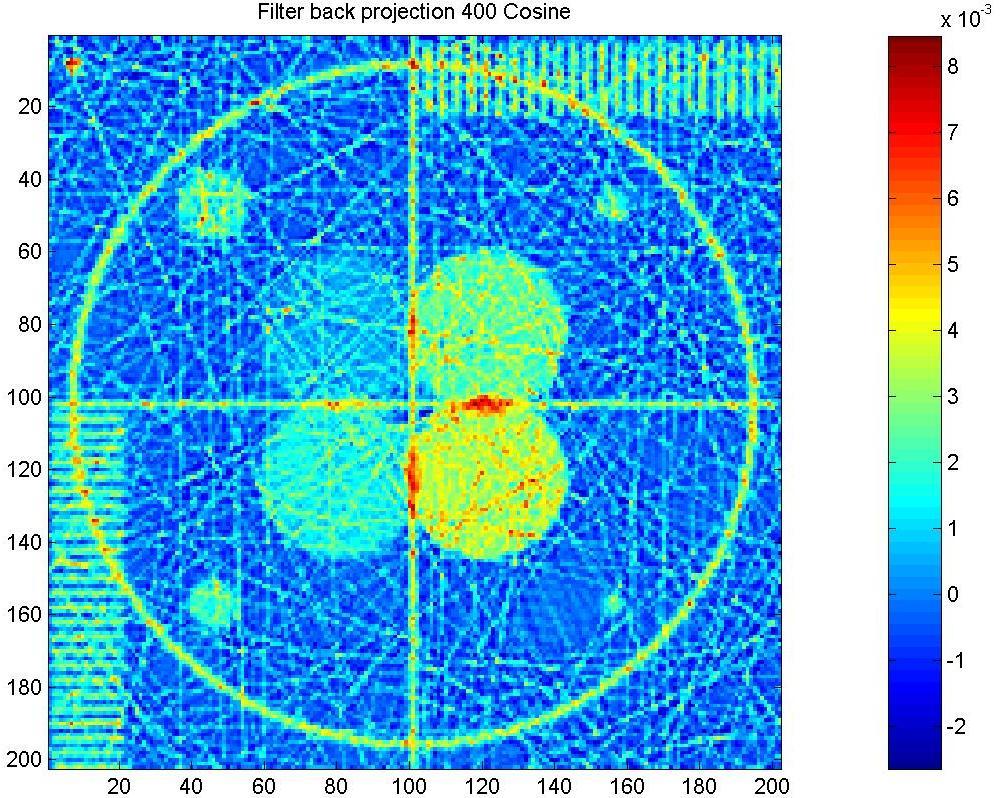
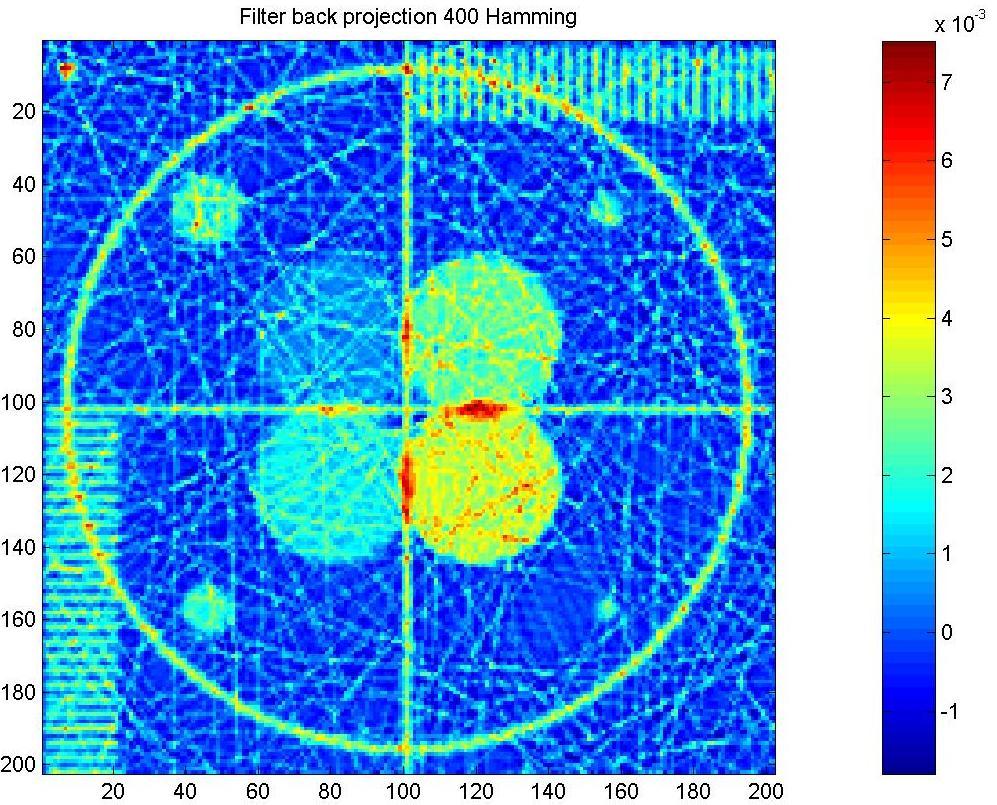
Figura 34 Ricostruzione d’immagine con diversi filtri. Filtro Cosine – Ricostruzione d’immagine con diversi filtri. Filtro di Hamming

Figura 36 Ricostruzione d’immagine con diversi filtri. Filtro di Hann